Behind the Build
Timeline: 3 Years (Concept to Deployment) - mid 2019 to 2022
Role: Lead Design (Product Design + CMF + UI and UX Web/Mobile App)
Scope: UV Disinfection Robot + Mobile Base (Modular Solution) + App Interface
Team: Cross-functional squad of robotics engineers, AI researchers, software developers, industrial and UX designers (Michal Kostyal, Baran Sahan, Arnav Bisoi, Akshay Kahate, Lokesh Yadav, Shekhar Nandanwar, Sunny Duseja along with contributions from other valuable team members)
Problem: During COVID-19, hospitals faced two major risks: frontline staff exposure during manual disinfection, and delays in delivering essentials to patients in isolation wards. Existing solutions were unsafe, slow, or unavailable. We needed a robot that could handle both—safely, reliably, and at scale.
Impact: We designed a modular robotic platform that could swap between UV disinfection and table delivery. Built from scratch with locally available parts during supply shortages, the system evolved into a fully autonomous solution with docking, fleet management, and remote monitoring.
Built and tested with hospital staff; reduced disinfection effort, supported safer workflows during critical response phase. Product sold across Europe and India (10+ Hospitals)
This project explores a modular robotic system designed in collaboration with UV Robots to support multiple healthcare functions within a single platform. Built to address the evolving needs of modern hospitals, the robot seamlessly switches between UV disinfection and table delivery modes—offering operational flexibility, reduced equipment footprint, and improved hygiene standards. With a focus on user-centric design, easy module integration, and safe autonomous navigation, this adaptive solution enables hospitals to scale efficiency while maintaining strict infection control protocols.


Before:
Hospitals needed contactless, rapid disinfection during COVID-19.
Hospitals needed contactless, rapid disinfection during COVID-19.
After:
During the peak of COVID-19, hospital staff were overwhelmed with manual sanitization procedures — exposing them to high viral loads and adding delays between patient turnovers. The challenge: design a mobile UV disinfection system that was fast to build, safe to operate, and deployable in high-stress environments — without relying on complex infrastructure.
During the peak of COVID-19, hospital staff were overwhelmed with manual sanitization procedures — exposing them to high viral loads and adding delays between patient turnovers. The challenge: design a mobile UV disinfection system that was fast to build, safe to operate, and deployable in high-stress environments — without relying on complex infrastructure.
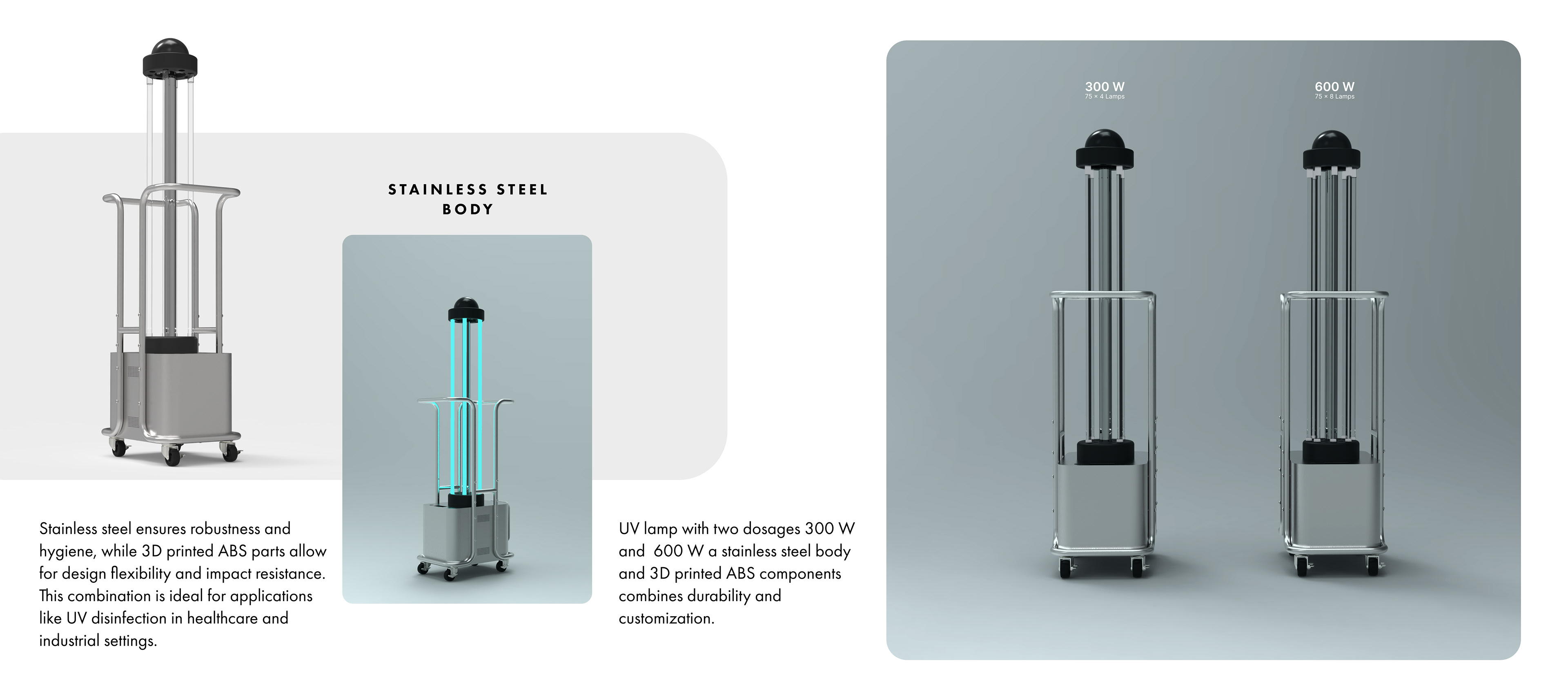
Project Introduction - Building STATIC UV DISINFECTION LAMP
This project began at the height of the COVID-19 pandemic, when hospitals were urgently looking for fast, contactless disinfection solutions. To understand the effectiveness of UV-C technology, we first developed a static UV disinfection lamp, a simple yet powerful unit that helped validate the use of ultraviolet light in eliminating pathogens from critical spaces.
Following successful trials and growing demand from hospitals for fixed UV systems, we extended the concept into a modular robotic platform, capable of both autonomous UV disinfection and in-hospital table delivery, offering flexibility, safety, and efficiency in high-risk environments.




From Static to Mobile: Building UV DISINFECTION ROBOT Under Constraints
After validating the effectiveness of static UV disinfection, we began integrating it onto a robotic base, transforming the unit into an autonomous system. With limited resources and supply chain disruptions during the pandemic, we repurposed existing trays and body components to build the first version, essentially crafting a mobile robot from scratch, using whatever was accessible.
As testing continued and feedback came in, the design evolved rapidly across 5+ iterations, improving in mobility, sensor integration, and safety protocols. Each version brought us closer to a robust, modular robot capable of UV disinfection and service delivery in high-pressure hospital environments.
DESIGN VERSION 1




DESIGN VERSION 2











DESIGN VERSION 3









DESign version 4 - Enter Modularity
By Version 4, we shifted our focus toward creating a modular solution, a flexible platform that could support multiple hospital tasks beyond disinfection. This phase marked the initial concept of building a universal robotic base, capable of docking with various functional modules, starting with UV disinfection and extending to table delivery. It laid the groundwork for a scalable robotic ecosystem adaptable to real hospital needs.




































Design Version 5
Designing the Robot Base
The robot base was engineered as the core mobility platform, built to support modular attachments while navigating complex indoor environments. We focused on achieving compact form, smooth maneuverability, and payload stability, ensuring it could operate safely in tight hospital corridors. The base integrates sensors for obstacle avoidance, autonomous navigation, and a smart docking system to enable seamless module switching forming the physical and functional foundation of the entire system.

FINAL DESIGN




Designing the Modularity
As the robot evolved, we focused on creating task-specific modules that could dock seamlessly with the base. The updated UV disinfection module was redesigned for greater coverage and stability, while the new table delivery moduleintroduced a unique Z-shaped lift mechanism, enabling the robot to place trays directly on top of hospital tables not just next to them. This modular architecture ensured the robot could adapt to multiple workflows without compromising efficiency or hygiene.



Seamless Auto-Docking for Effortless Module Swapping
The robot features an intelligent auto-docking system that allows it to autonomously connect and disconnect from various modules without any human intervention. Using onboard sensors, alignment guides, and magnetic or mechanical latching systems, the robot can precisely locate a module, dock into position, and switch between tasks like UV disinfection and table delivery in seconds. This design enables round-the-clock operation, reduces downtime, and allows a single robot to perform multiple functions across different environments making it scalable, efficient, and future-ready.






Z-Shaped Table Delivery Module (Just an Idea, built a prototype but did not go for production)
The Z-shaped delivery module was designed to bridge the gap between robot and patient — quite literally. Traditional delivery bots often stop beside tables, requiring manual pick-up. Our Z-shaped mechanism lifts and extends the tray over the surface of hospital tables, allowing the robot to place meals, medication, or documents directly on top without staff intervention. This ensures precise, contactless delivery, improves accessibility for patients, and maintains hygiene standards in sensitive care environments.



Z SHAPE BODY STRUCTURE







Final Design







Final Design






Modular - Food Delivery Inside a Hospital

Modular - Food Delivery Inside a Hospital

Modular - Food Delivery Inside a Hospital

Modular - Food Delivery Inside a Hospital

Modular - UV Disinfection at Mumbai Airport

Modular - UV Disinfection at Mumbai Airport

Modular - UV Disinfection at Mumbai Airport

Modular - UV Disinfection at Mumbai Airport
What I Learned from This Project
Working on UV Robots during the pandemic pushed me beyond just design execution it taught me how to adapt, improvise, and lead under pressure.
Designing in Crisis
With supply chains broken, I learned how to build reliable systems using whatever components were available, turning constraints into creative opportunities.
The Power of Modularity
I discovered how modular thinking can multiply the value of a single platform, making it adaptable for different hospital needs.
User-Centered Engineering
Deploying robots in real hospital environments taught me to prioritize simplicity, reliability, and safety over complexity.
Rapid Iteration & Deployment:
I experienced first-hand how fast iteration, testing, and feedback loops are crucial when designing technology for real-world, high-stakes environments.
Collaboration Across Disciplines:
Working closely with doctors, engineers, and hospital staff reinforced the importance of cross-functional teamwork in creating meaningful solutions.
This project wasn’t just about building a robot it was about building resilience, adaptability, and empathy into technology.







